Recently, novel millirobot research accomplished by Dr. WANG Min from the College of Mechanical and Electrical Engineering (CMEE) of Central South University, in collaboration with research teams from the University of Hong Kong (HKU), City University of Hong Kong (CityU), and Hong Kong Polytechnic University (PolyU), were published online in the Nature Communications under the title “Magnetically actuated momentum-driven millirobots”. Dr. WANG Min serves as the first author; Professor LIU Jun (HKU), Professor ZHANG Jiachen (CityU), and Professor WANG Zuankai (PolyU) co-serve as corresponding authors.
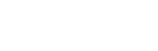
The schematic diagram of MiaBot’s locomotion in restricted and high-frictional environments
Millirobots exhibit exceptional operational capabilities in confined and hazardous environments, with broad applicability across critical fields including underground resource exploration, industrial pipeline inspection, post-disaster search and rescue, and in-vivo precision diagnosis. In recent years, extensive efforts have been dedicated to optimizing actuation mechanisms, innovating structural configurations, advancing positioning and tracking technologies, and expanding application scenarios for millirobots, leading to phased progress in related technical domains. However, constrained by structural limitations inherent to miniaturization, existing millirobots face significant challenges in integrating complex transmission components and high-performance actuators. This has resulted in persistent challenges in boosting millirobots’ instantaneous output force, enabling heavy-load transportation, and adapting to high-resistance environments, which severely impede the practical application of the technology.
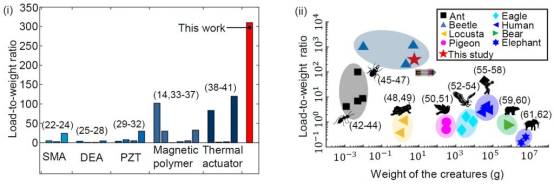
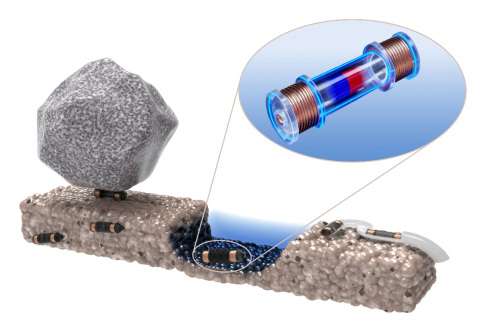
Comparison of MiaBot's load capacity with existing miniature robots and creatures
This work marks a critical breakthrough by presenting a miniature robot with strong thrust force and are robustness to various high-frictional terrains. Specifically, the research team proposed a hybrid actuation mechanism of magnetically inner actuation and momentum driven (MiaBot). They successfully developed a compact robot weighing merely 5.82 grams. With an input current of 0.6 A, this robot can generate an ultra-high output force of 16.67 N, breaking the inherent trade-off between “miniaturized size” and “high output force” for millirobots. Based on this core technology, the robot realizes stable operation in typical high-resistance environments such as viscous liquids, sandy media, and constrained pipelines, while possessing the capacity to transport loads over 300 times its own weight. In addition, the team has overcome the challenges of high-efficiency directional control and real-time positioning without relying on visual information. The research providing a brand-new paradigm for the innovation of millirobot actuation technologies. Its outcomes are expected to be applied on more confined-space operation scenarios with stringent requirements for output force.
First Review | WANG Min
Second Review | LU Xinjiang
Third Review | LI Lingzhi